Neural Networks
Feed-Forward Networks and Deep Learning
Huanfa Chen - huanfa.chen@ucl.ac.uk
09/02/2026
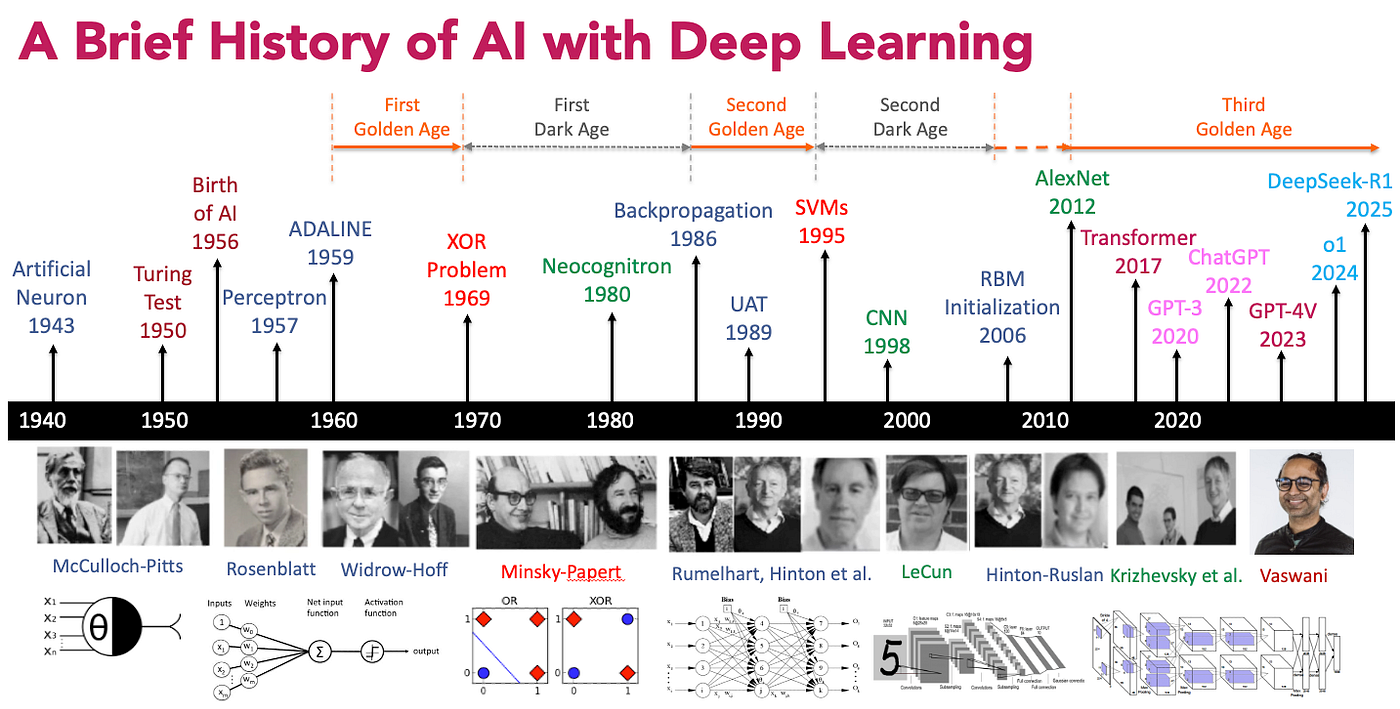
History
Nearly everything we talk about today existed in 1990
What changed since then?
More data
Faster computers (GPUs)
Some improvements: Relu, dropout, adam, batch-normalization, residual networks
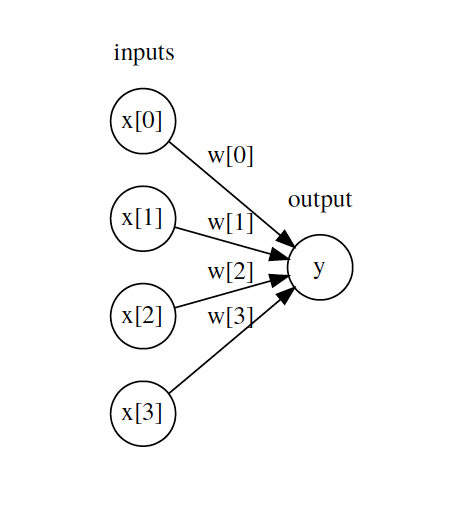
Linear Regression as Neural Net
\(y = \sum_i W_i x_i + b = Wx + b\)
\(y = g(Wx + b)\) , where \(g(z) = z\) (identity function)
Logistic Regression as Neural Net
\(y = \sigma(Wx + b)\)
\(\sigma(z) = \frac{1}{1 + e^{-z}}\)
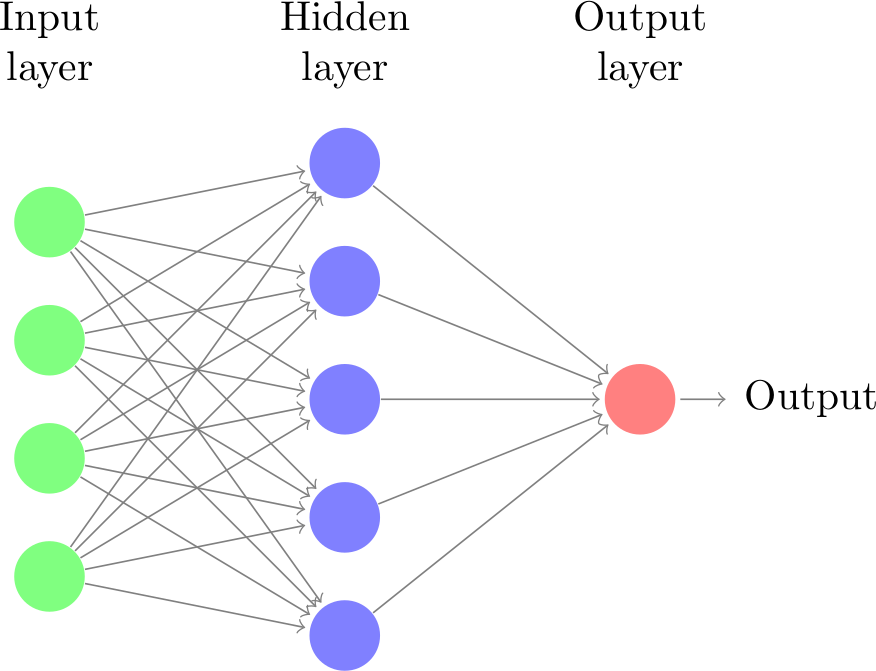
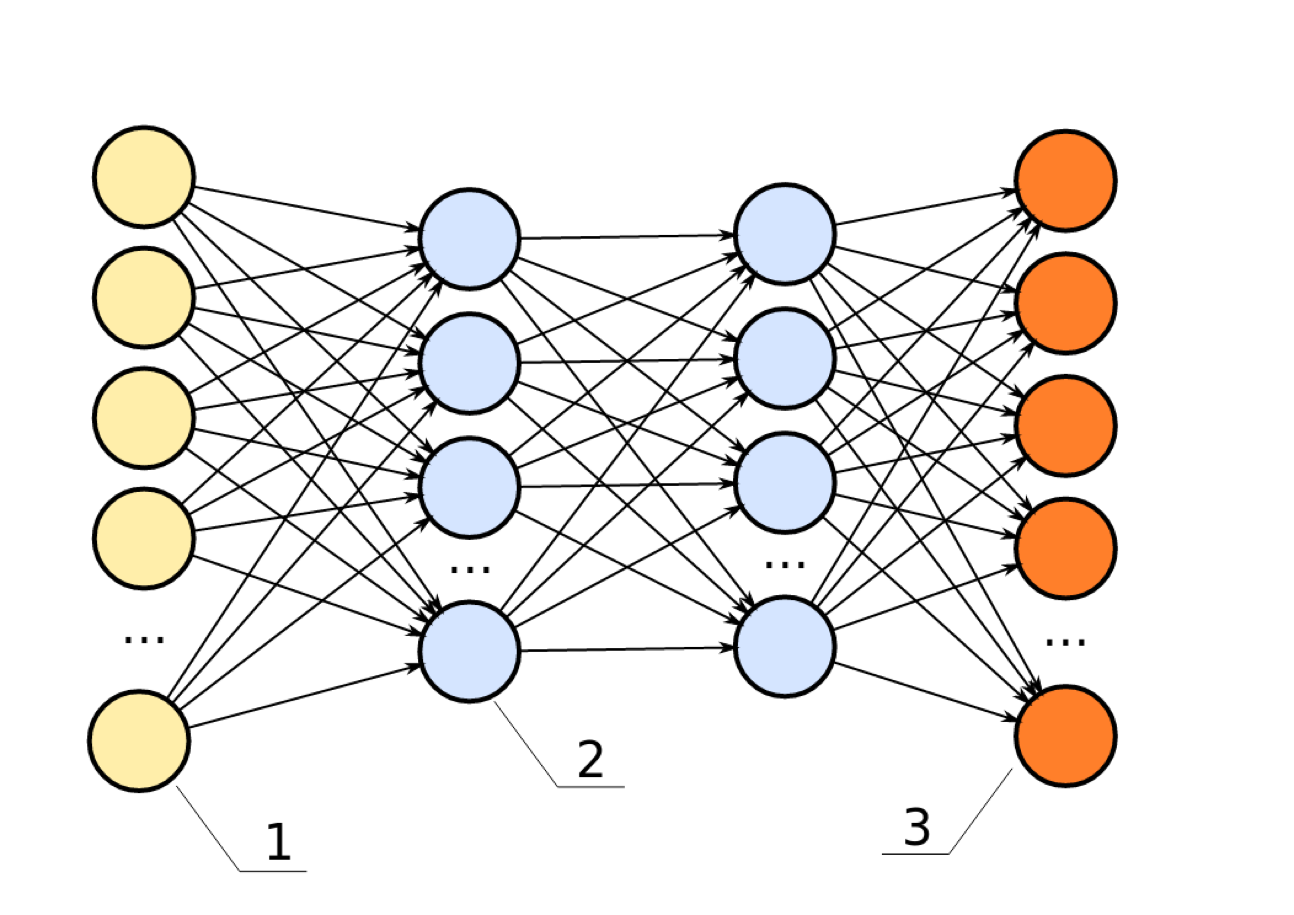
Basic Architecture of Neural Networks
\(h(x) = f(W_1x + b_1)\) ; f: hidden layer activation function
\(o(x) = g(W_2h(x) + b_2)\) g: output layer activation function
Output layer activation function \(g\)
For regression: \(g\) is identity function \(g(z) = z\)
For binary classification: \(g\) is sigmoid function \(g(z) = \sigma(z)\) (to output a probability [0,1])
For multi-class classification: \(g\) is softmax function \(g(z_i) = \frac{e^{z_i}}{\sum_j e^{z_j}}\) (to output a probability distribution over classes)
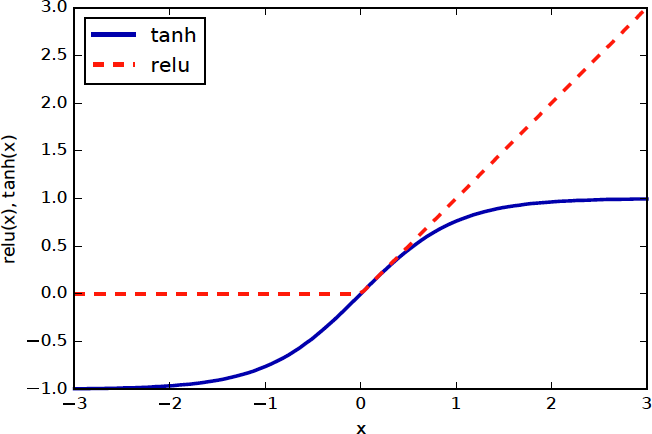
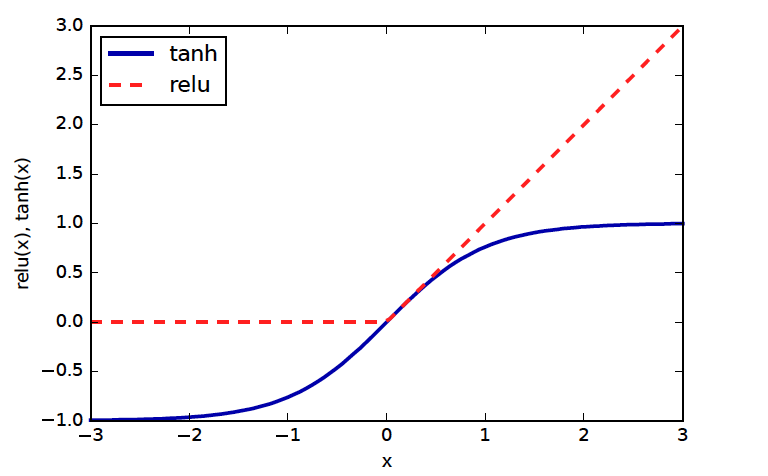
Nonlinear Activation Functions \(f\)
The primary job of f is to break the linearity of the model
Standard choices: tanh (pronounced like “than”) or relu (rectified linear unit) (pronounced as /ray-loo/)
Tanh squashes between -1 and 1; saturates towards infinitiesReLU is constant zero for negative numbers, then identity
More Layers
Hidden layers usually all have the same non-linear function
Other names: Multilayer perceptron, feed-forward neural network
Many layers → “deep learning”
Supervised Neural Networks
Non-linear models for classification and regression
Work well for very large datasets
Notoriously slow to train; need for GPUs
Use dot products \(Wx\) ; require preprocessing similar to SVM or PCA, unlike trees
Many variants: Convolutional nets, GRUs, LSTMs, recursive networks, VAEs, GANs, deep RL
Training Objective
\(h(x) = f(W_1x+b_1)\)
\(o(x) = g(W_2h(x)+b_2) = g(W_2f(W_1x + b_1) + b_2)\)
The objective is to minimise the difference between true and predicted y values, or the loss function
\(\min_{W_1,W_2,b_1,b_2} \sum\limits_{i=1}^N l(y_i,o(x_i))\)
\(= \min_{W_1,W_2,b_1,b_2} \sum\limits_{i=1}^N l(y_i,g(W_2f(W_1x+b_1)+b_2))\)
\(l\) = Squared loss for regression; Cross-entropy loss for classification
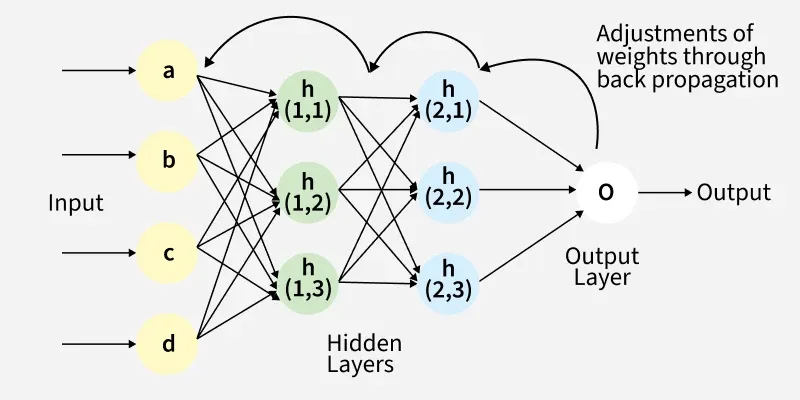
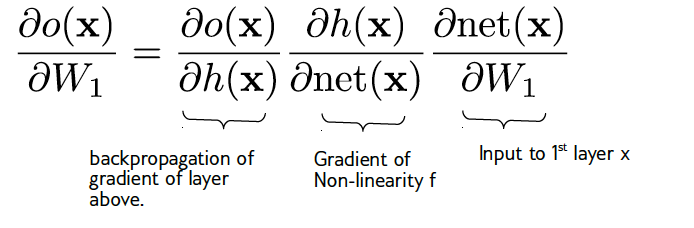
Backpropagation
Need \(\frac{\partial l(y, o)}{\partial W_i}\) and \(\frac{\partial l(y, o)}{\partial b_i}\)
\(\text{net}(x) := W_1x + b_1\)
Gradient Computation
Backpropagation is clever application of chain rule for derivatives
Single backward pass from output to input computes derivatives
An efficient way to compute gradients
Training NN is an optimisation problem, which means to find the optimal parameters \(W_i\) and \(b_i\) that minimise the loss function
Training NN is a non-convex and challenging optimisation problem. Usually a local optimum is found.
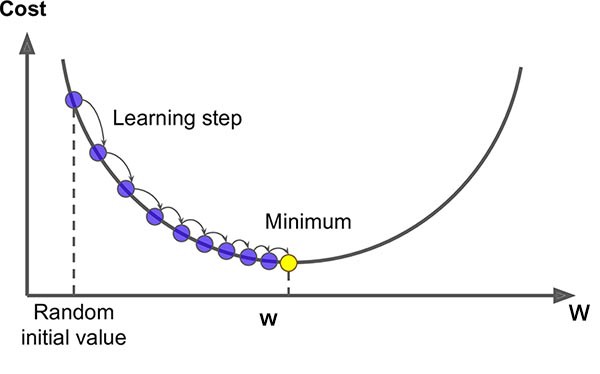
Recap on gradient
Optimise \(\arg\min_w F(w)\) by stepping along \(-\nabla F(w)\)
Update: \(w_{i+1} = w_i - \eta_i \nabla F(w_i)\)
Converges to a local minimum
ReLU Differentiability
ReLU not differentiable at zero. At x>0, gradient is 1; at x<0, gradient is 0
For a function to be differentiable, the slope must be the same whether approaching from the left or right Use subgradient descent; any gradient below the function works
In practice, most FL framewors simply hardcode the gradient at zero to be 0 or 0.5
Optimising W, b
Usually, We don’t use all data to compute the gradient at each step.
Batch \(W_i \leftarrow W_i - \eta\sum\limits_{j=1}^N \frac{\partial l(x_j,y_j)}{\partial W_i}\)
Instead, we can use a subset of data to estimate the gradient.
Online/Stochastic \(W_i \leftarrow W_i - \eta\frac{\partial l(x_j,y_j)}{\partial W_i}\)
Minibatch \(W_i \leftarrow W_i - \eta\sum\limits_{j=k}^{k+m} \frac{\partial l(x_j,y_j)}{\partial W_i}\)
Learning Heuristics
\(\eta\) controls the step size of gradient descent. Can adjust during training.Constant \(\eta\) is not good
Can decrease \(\eta\) over time
Better: adaptive \(\eta\) for each entry of \(W_i\)
State-of-the-art: Adam (Adaptive Moment Estimation )
Adam optimiser
The logic : for a parameter, if a gradient is consistely large, should decrease the learning rate and slow down;If a gradient is consistely small, should increase the learning rate for that parameter.
The process : keep track of the first moment (mean) and second moment (uncentered variance) of the gradients; use them to adapt the learning rate for each parameter
Update rule of Adam optimiser
Estimate 1st moment: \(m_t = \beta_1 m_{t-1} + (1 - \beta_1)g_t\)
Estimate 2nd moment: \(v_t = \beta_2 v_{t-1} + (1 - \beta_2)g_t^2\)
Bias Correction: as \(m_t\) and \(v_t\) start at zero, Adam uses a mathematical trick to “warm them up” during the first few steps.
Update Weight: \(\theta_{t+1} = \theta_t - \frac{\eta}{\sqrt{\hat{v}_t} + \epsilon} \hat{m}_t\)
Picking Optimisation Algorithms
Small dataset: off-the-shelf like l-bfgs (quicker than Adam on small datasets)
Big dataset: adam / rmsprop
Have time & nerve: tune the schedule
Neural Nets with sklearn
= MLPClassifier(solver= 'lbfgs' , random_state= 0 ).fit(X_train, y_train)print (mlp.score(X_train, y_train))print (mlp.score(X_test, y_test))
Don’t use sklearn for real projects but toy problems in neural nets
Why? sklearn’s MLP is not optimised for large datasets; no GPU support; no support for conv nets, etc.
Complexity Control
Number of parameters: hidden layers, hidden units
Regularisation
Early Stopping
Dropout
NN subject to overfitting and random seeds
Network is way over capacity and can overfit in many ways
Regularisation might make it less dependent on initialization
Regularisation
Regularisation works by modifying the loss function: \(L = \sum\limits_{i=1}^N l(y_i, o(x_i))\)
L2 regularisation : add \(\lambda \sum\limits_i W_i^2\) to loss function; to penalise large weightsL1 regularisation : add \(\lambda \sum\limits_i |W_i|\) to loss function; to encourage many weights to be zeroDropout : randomly set some activations to zero during training; prevents co-adaptation of neurons
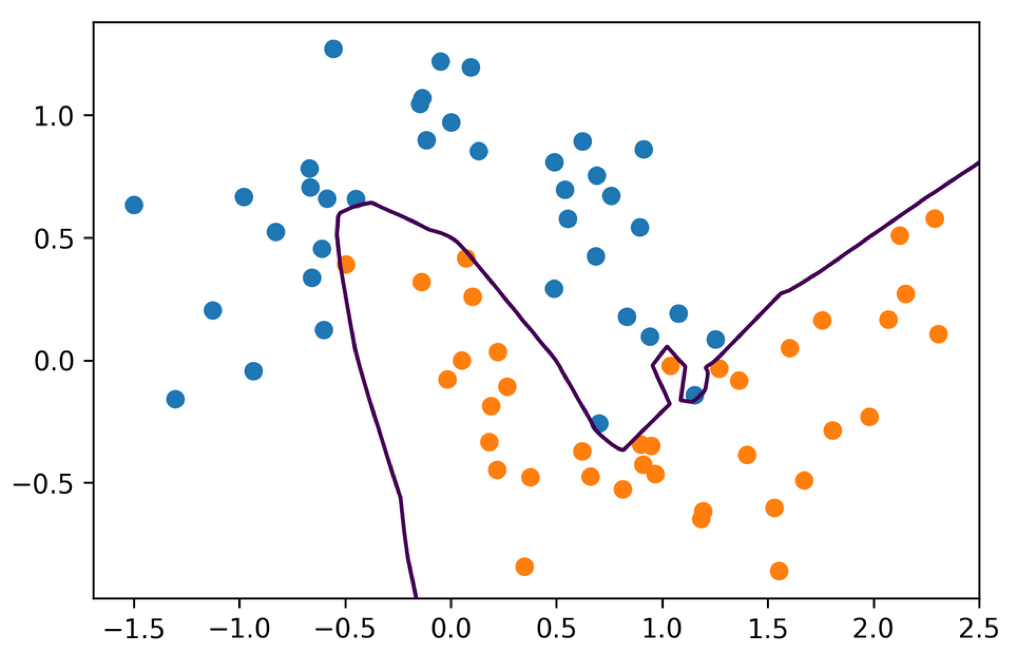
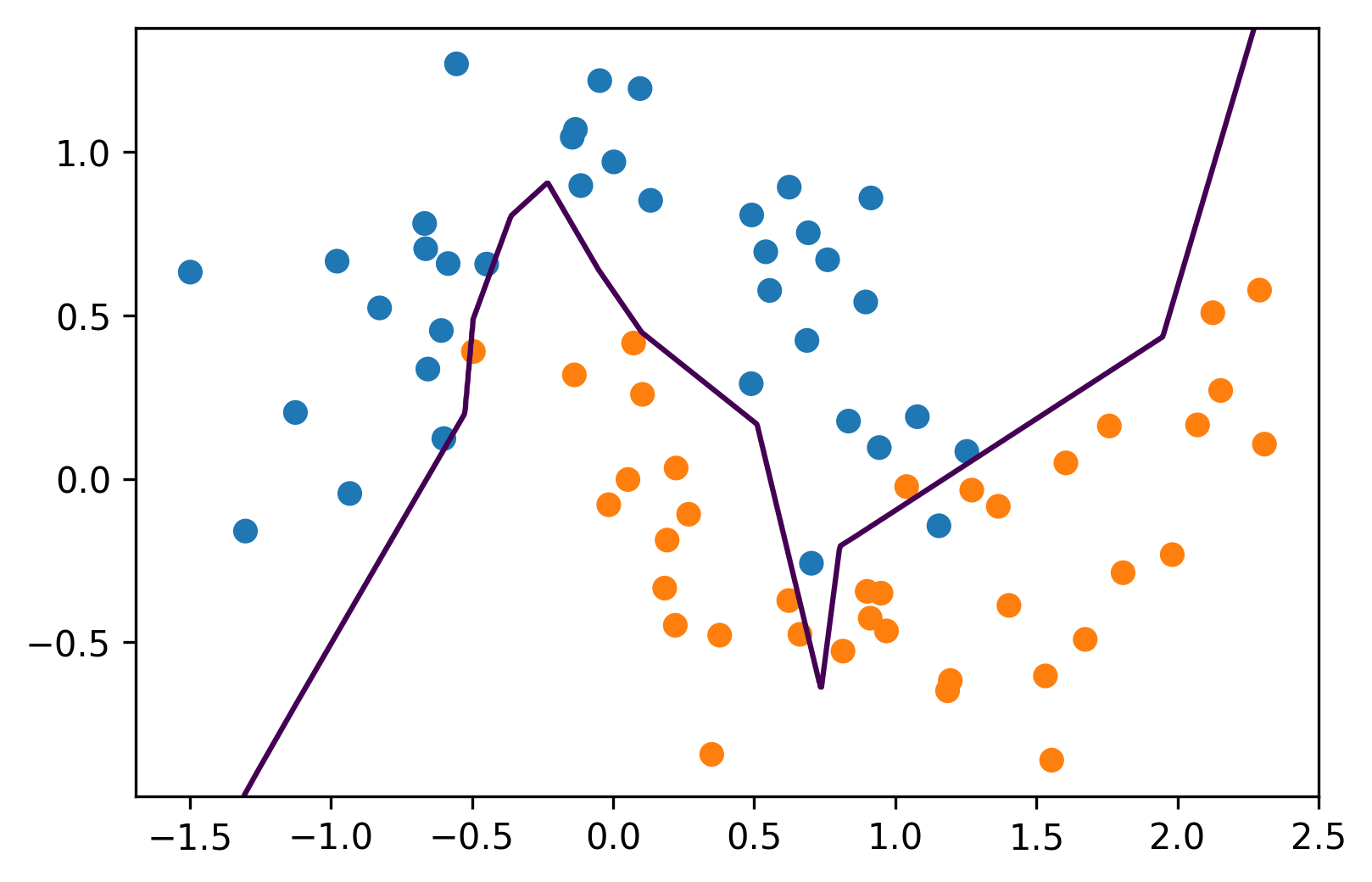
Hidden Layer Size
= MLPClassifier(solver= 'lbfgs' , hidden_layer_sizes= (5 ,), random_state= 10 )
Single hidden layer with 5 units
Each unit corresponds to different part of decision boundary
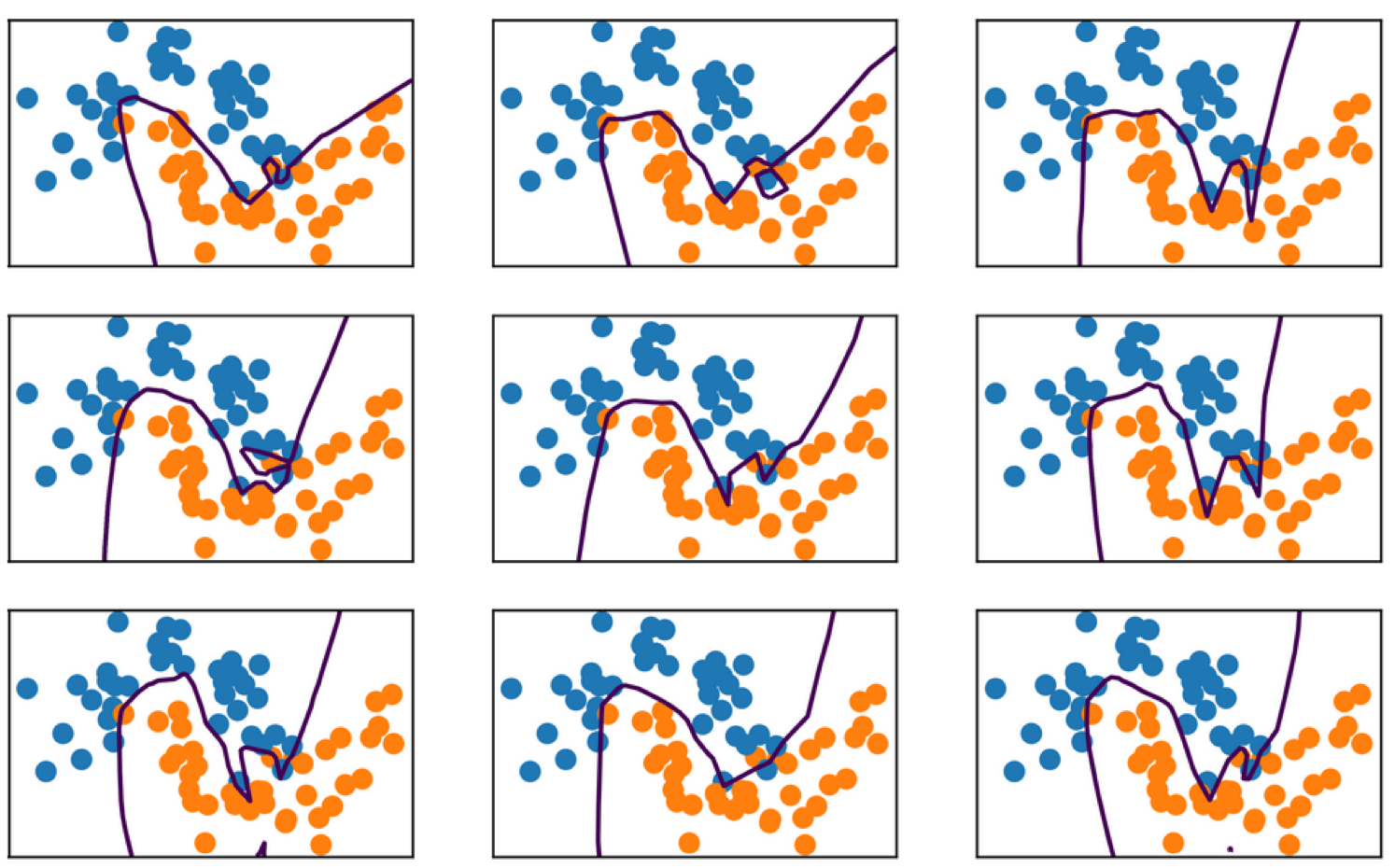
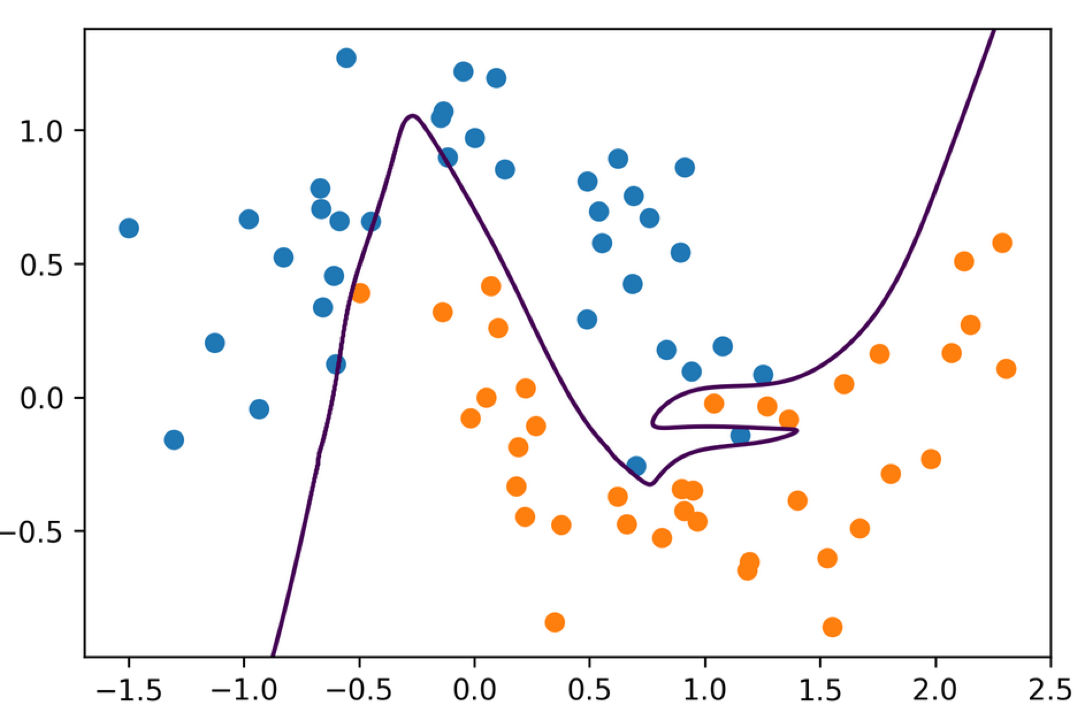
Multiple Hidden Layers
= MLPClassifier(solver= 'lbfgs' , hidden_layer_sizes= (10 , 10 , 10 ), random_state= 0 )
3 hidden layers each of size 10
Main way to control complexity
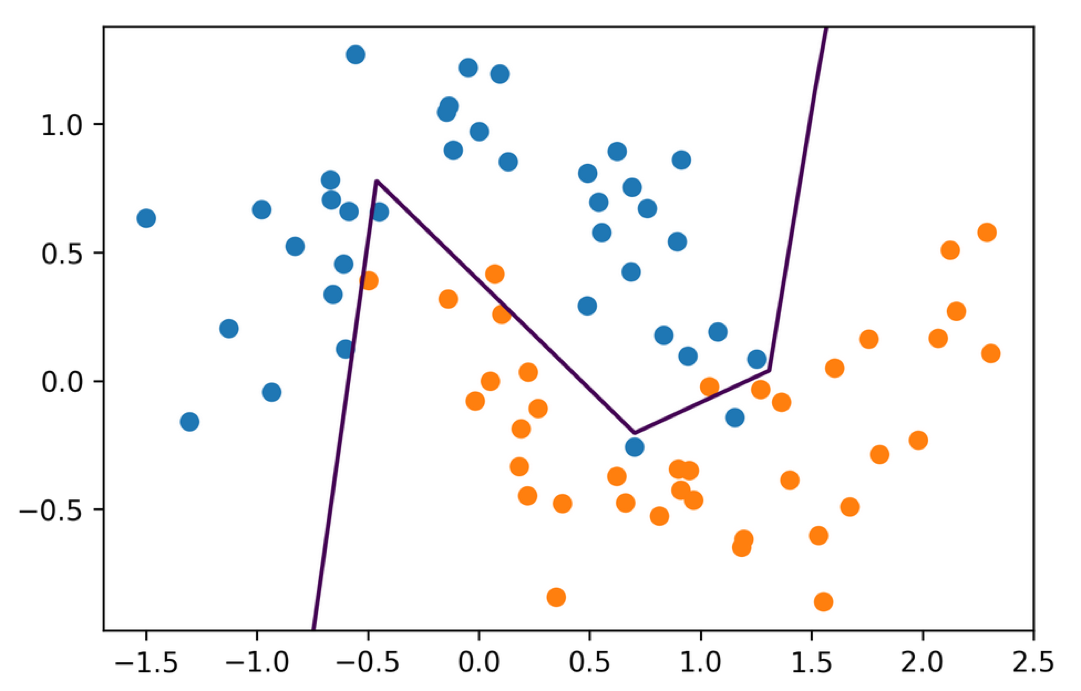
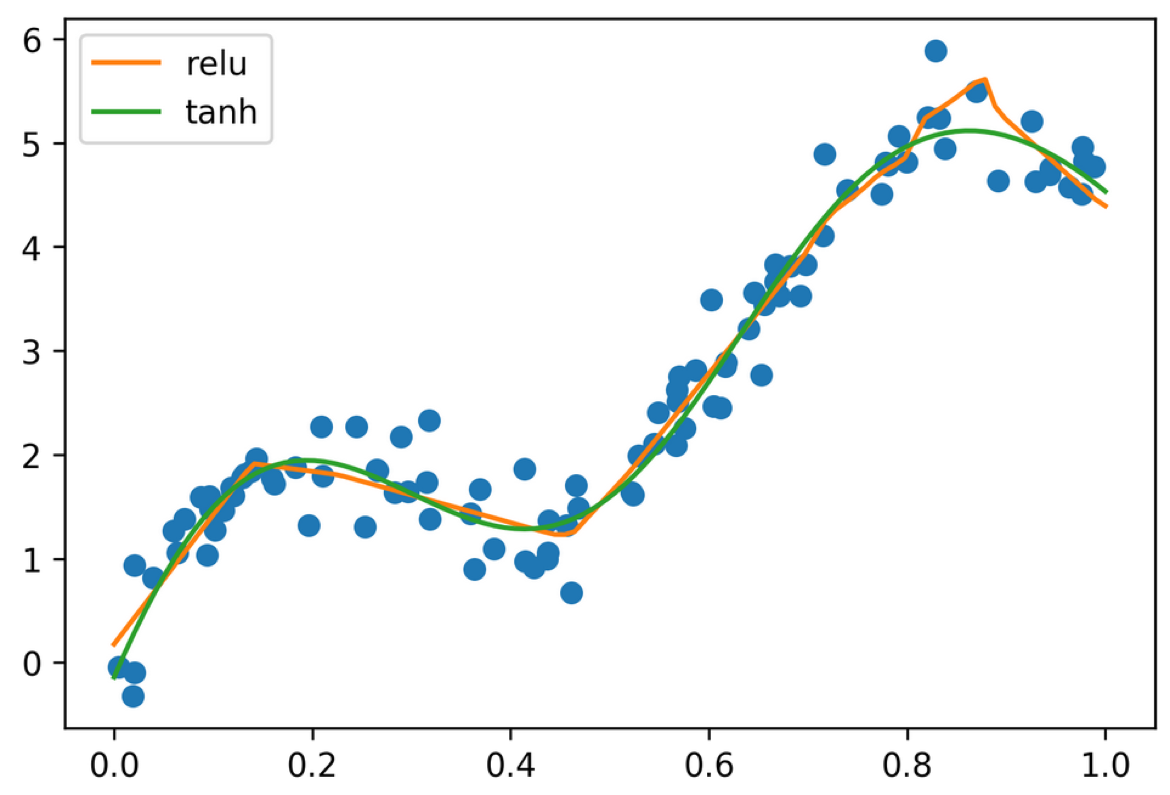
Activation Functions
= MLPClassifier(solver= 'lbfgs' , hidden_layer_sizes= (10 , 10 , 10 ),= 'tanh' , random_state= 0 )
Using tanh gives smoother boundaries
ReLU doesn’t work as well with l-bfgs on small networks
For large networks, relu is preferred
Regression
from sklearn.neural_network import MLPRegressor= MLPRegressor(solver= \"lbfgs \" ).fit(X, y) mlp_tanh = MLPRegressor (solver= \"lbfgs \" , activation='tanh').fit(X, y)
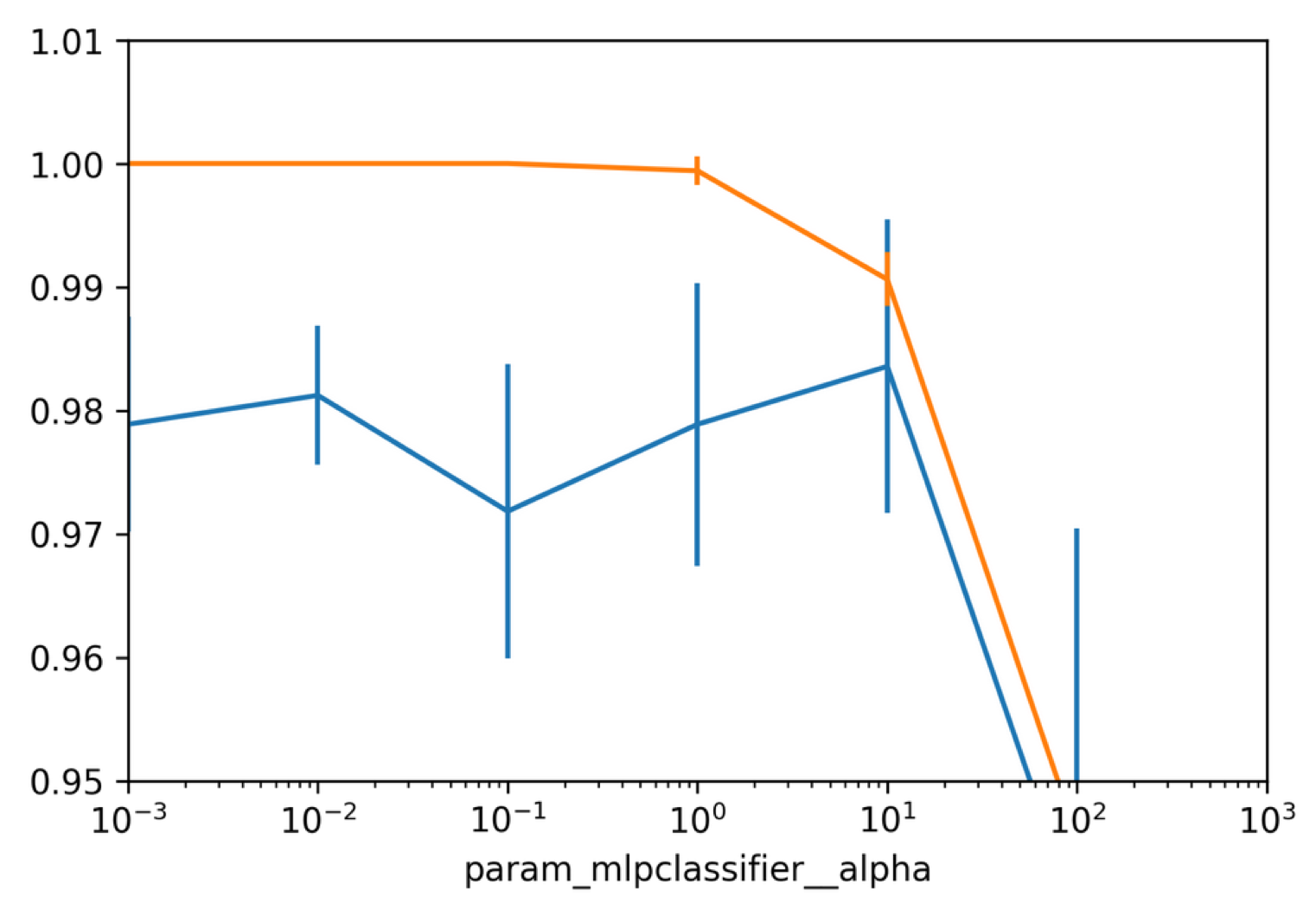
Grid-Searching Neural Nets
from sklearn.datasets import load_breast_cancer= load_breast_cancer()= train_test_split(= data.target, random_state= 0 )from sklearn.model_selection import GridSearchCV= make_pipeline(StandardScaler(), MLPClassifier(solver= \"lbfgs \" , random_state=1)) param_grid = {'mlpclassifier__alpha': np.logspace(-3, 3, 7)} = GridSearchCV(pipe, param_grid)
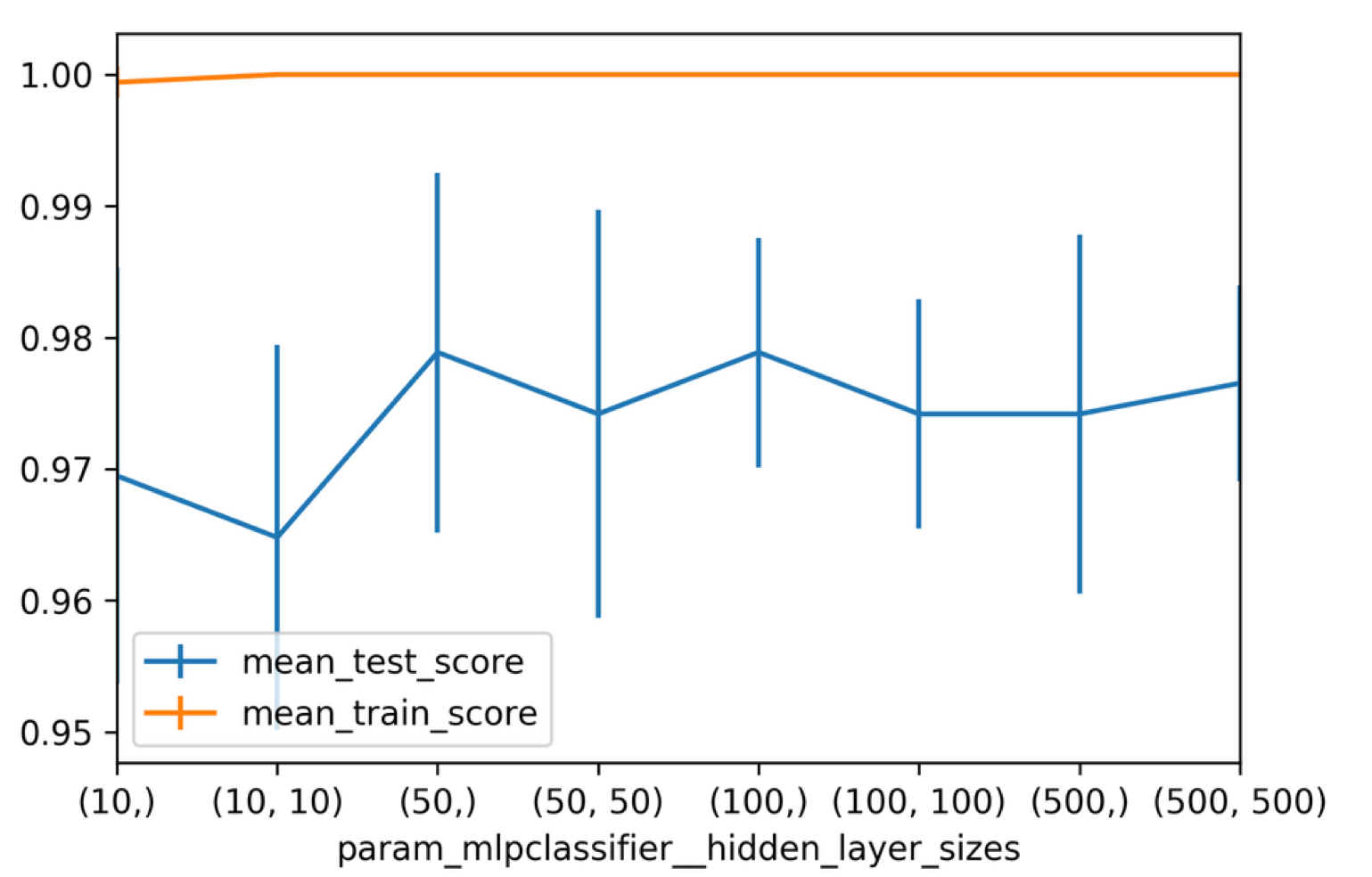
Searching Hidden Layer Sizes
from sklearn.model_selection import GridSearchCV= make_pipeline(StandardScaler(), MLPClassifier(solver= \"lbfgs \" , random_state=1)) param_grid = {'mlpclassifier__hidden_layer_sizes': 10 ,), (50 ,), (100 ,), (500 ,), (10 , 10 ), (50 , 50 ), (100 , 100 ), (500 , 500 )]}= GridSearchCV(pipe, param_grid)
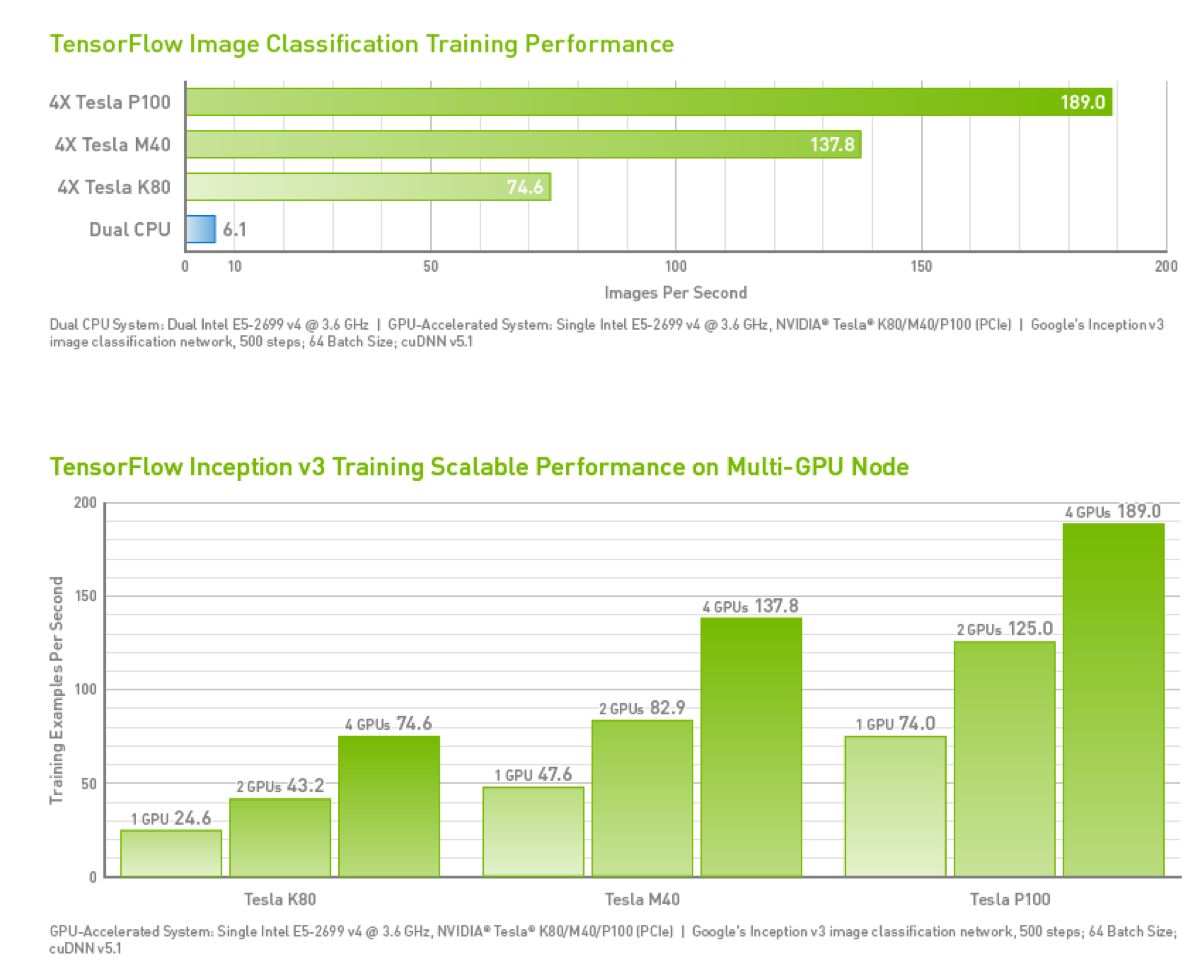
GPU Support
Important limitation: GPUs have much less memory than RAM
Memory copies between RAM and GPU are expensive
CPU VS. GPU
Architecture
Few cores optimised for sequential tasks
Thousands of cores for parallel processing
Memory
Larger cache size, less memory bandwidth
Higher memory bandwidth, less cache size
Power Consumption
Generally lower power consumption
Higher power consumption due to many cores
Use Cases
General-purpose computing, complex logic
Graphics rendering, deep learning, scientific simulations
Cost
Less expensive
Expensive
Programming Complexity
Easier to program for general tasks
Requires knowledge of parallel programming (e.g., CUDA)
How much GPU power do you need?
Small Project (MNIST, basic CNN)1x RTX 3060 / 4060
< 1 hour
< $1
Fine-tuning 7B LLM (e.g., Llama 3 8B)1x A100 (80GB)
5–20 hours
$10 – $40
Training Mid-size Model (e.g., Stable Diffusion)8x A100 Cluster
500–2,000 hours
$1,000 – $5,000
Pre-training Large LLM (GPT-3/4 scale)10,000+ H100s
Millions of hours
$50M – $100M+
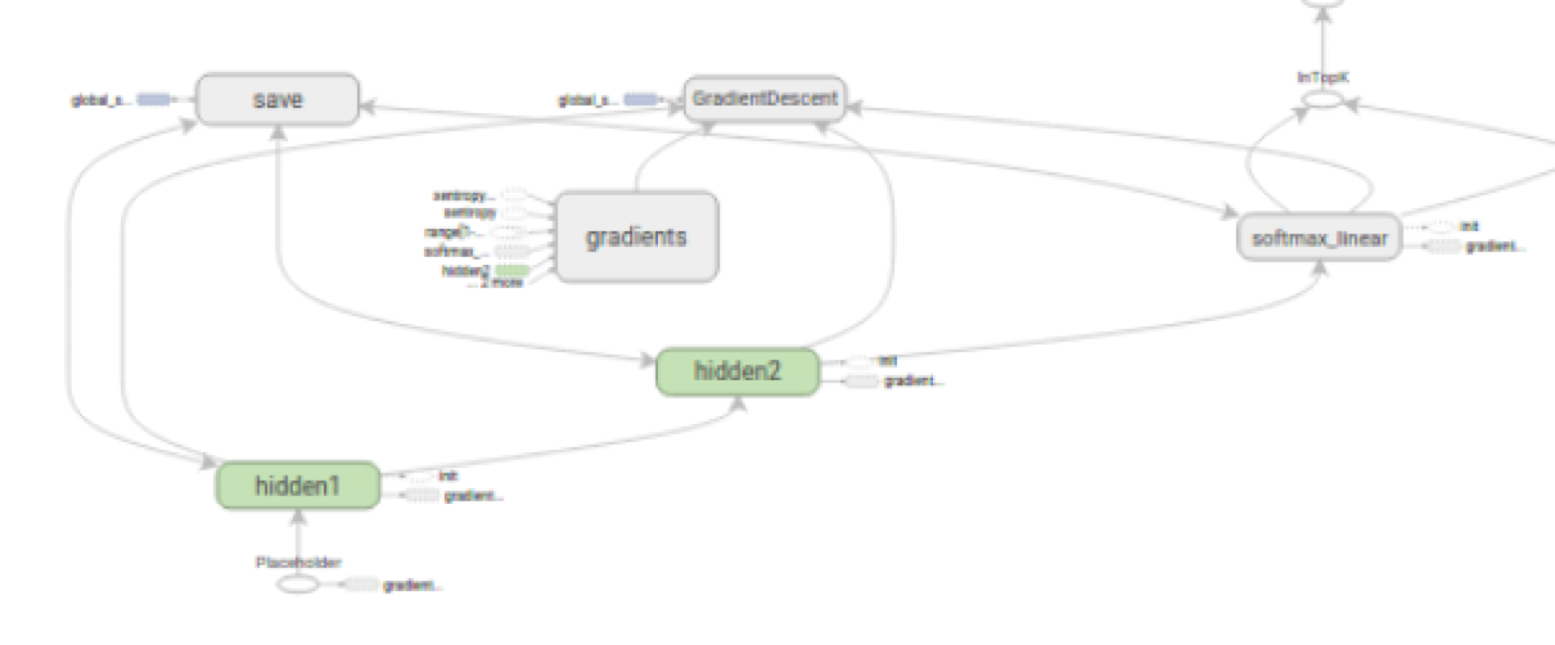
Computational Graph
‘blue-print’; a directed acyclic graph representing computations in NN
Nodes represent variables or operations (e.g., matrix multiplication, activation functions), edges represent flow of data (tensors) between operations
Given limited GPU memory, important to know what to cache/discard
Helps with visual debugging and understanding network structure
Deep Learning Framework Requirements
Autodiff
GPU support
Optimisation and inspection of computation graph
On-the-fly generation of computation graph (optional)
Distribution over multiple GPUs and/or cluster (optional)
Current choices: PyTorch / Torch, TensorFlow
Deep Learning Libraries
PyTorch (torch) (default for AI research & development )
Keras (TensorFlow, CNTK, Theano) (enterprise production )
Chainer (chainer)
MXNet (MXNet)
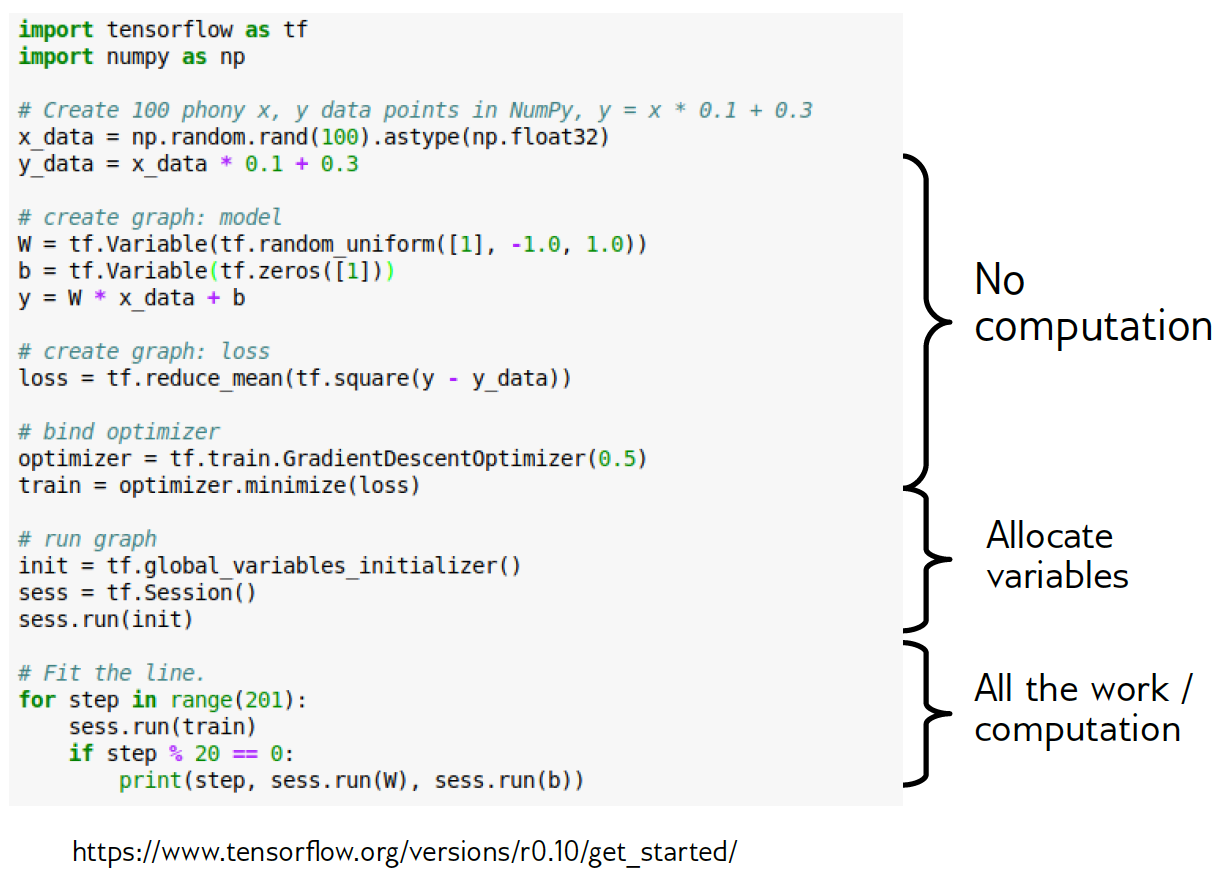
Quick Look at TensorFlow
"Down to the metal" - don’t use for everyday tasks
Three steps for learning:
Build computation graph (using array operations and functions)
Create Optimizer (gradient descent, adam, etc.) attached to graph
Run actual computation
PyTorch Example
= torch.float = torch.device("cpu" )= 100 = torch.randn(N, 1 , device= device, dtype= dtype)= torch.randn(N, 1 , device= device, dtype= dtype)= torch.randn(D_in, H, device= device, dtype= dtype)= 1e-6 for t in range (500 ):= x.mm(w1)= (y_pred - y).pow (2 ).sum ().item()-= learning_rate * w1.grad
Best Practices
Don’t go down to the metal (i.e. write low-level code) unless you have to!
Don’t write TensorFlow, write Keras!
Don’t write PyTorch, write pytorch.nn or FastAI (or Skorch or ignite)
Convolutional Neural Networks
Idea #1 Behind CNNs
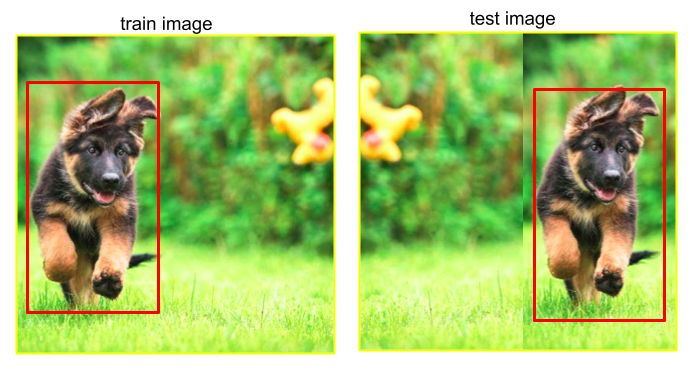
Translation invariance : CNN can recognise an object regardless of where it is in the frame.… because the same filters scan every part of the image (weight sharing)
Idea #2 Behind CNNs
Weight sharing : the principle that the same set of weights (a filter, or kernel) is used to scan every part of an imageSo, this filter will detect a specific feature (e.g. edge, curve), regardless of its position
Each filter corresponds to a specific feature or pattern, rather than location-specific information
Why Weight Sharing?
Reduces number of parameters; less prone to overfitting
Comparison: for a 100x100 image with 3 channels (RGB), a fully connected layer in NN with 100 hidden units would have 3 million parameters (100100 3*100);
a convolutional layer with 10 filters of size 5x5 would have only 750 parameters (55 10)
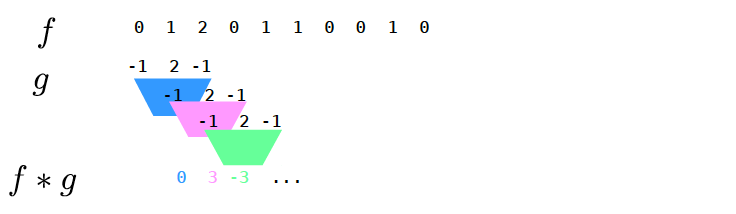
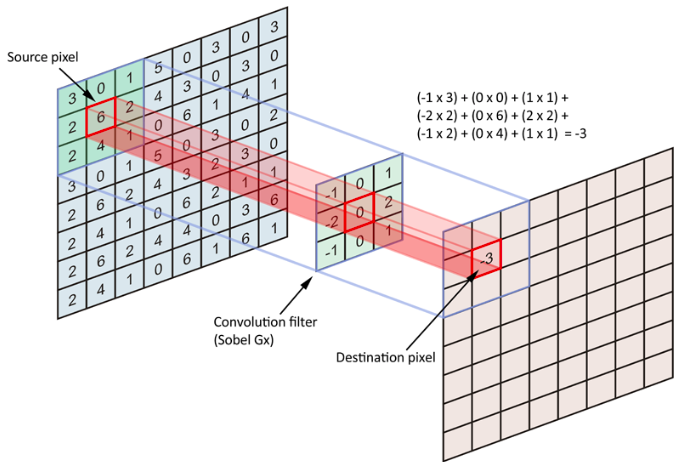
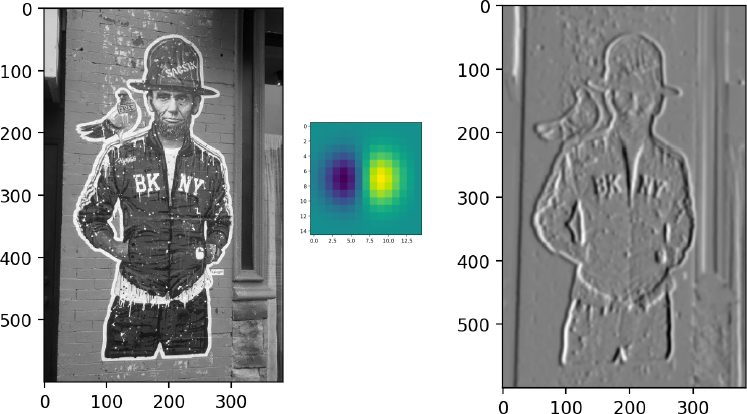
Definition of Convolution
\[(f*g)[n] = \sum\limits_{m=-\infty}^\infty f[m]g[n-m]\]
\[= \sum\limits_{m=-\infty}^\infty f[n-m]g[m]\]
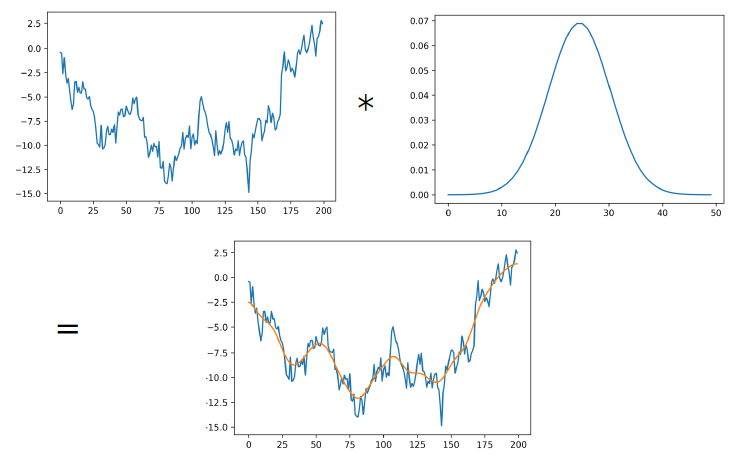
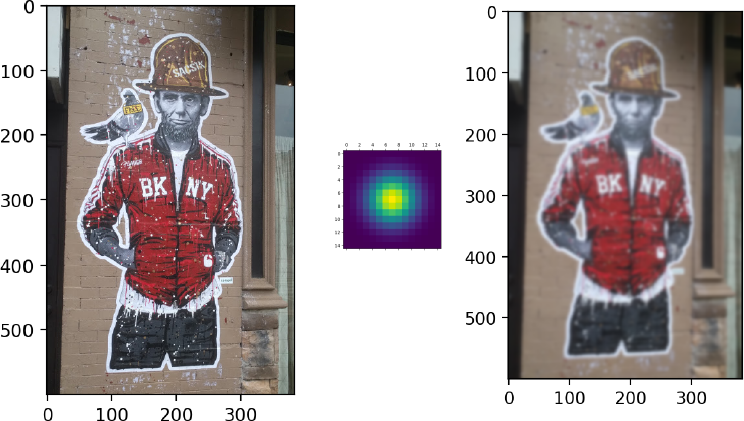
1D Example: Gaussian Smoothing
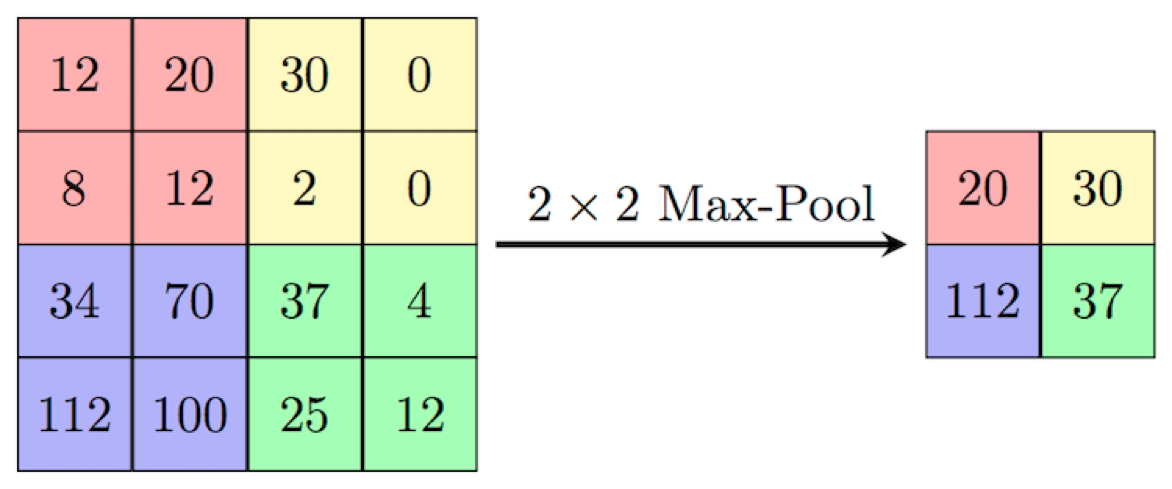
Max Pooling
Need to remember position of maximum for back-propagation
Again not differentiable → subgradient descent
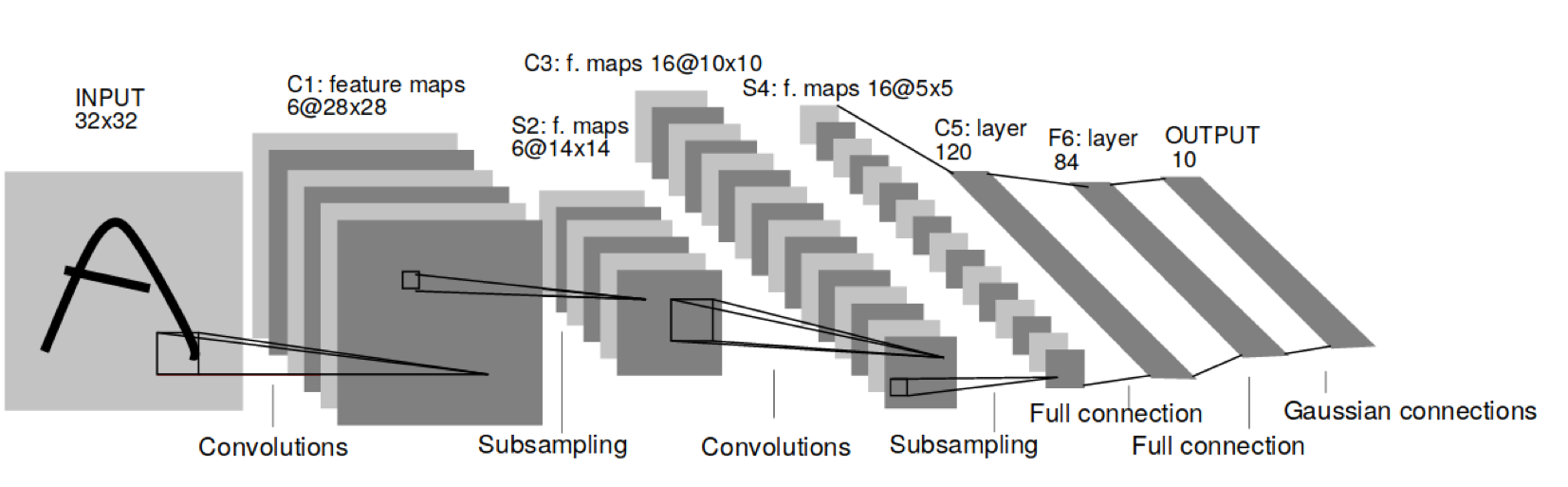
Convolutional Neural Networks
Y. LeCun, L. Bottou, Y. Bengio, and P. Haffner: Gradient-based learning applied to document recognition
Preparing Data
= 128 = 10 = 12 = 28 , 28 = mnist.load_data()= x_train.reshape(x_train.shape[0 ], img_rows, img_cols, 1 )= x_test.reshape(x_test.shape[0 ], img_rows, img_cols, 1 )= (img_rows, img_cols, 1 )= keras.utils.to_categorical(y_train, num_classes)= keras.utils.to_categorical(y_test, num_classes)
Create Tiny Network
from keras.layers import Conv2D, MaxPooling2D, Flatten= 10 = Sequential()32 , kernel_size= (3 , 3 ),= 'relu' ,= input_shape))= (2 , 2 )))32 , (3 , 3 ), activation= 'relu' ))= (2 , 2 )))64 , activation= 'relu' ))= 'softmax' ))
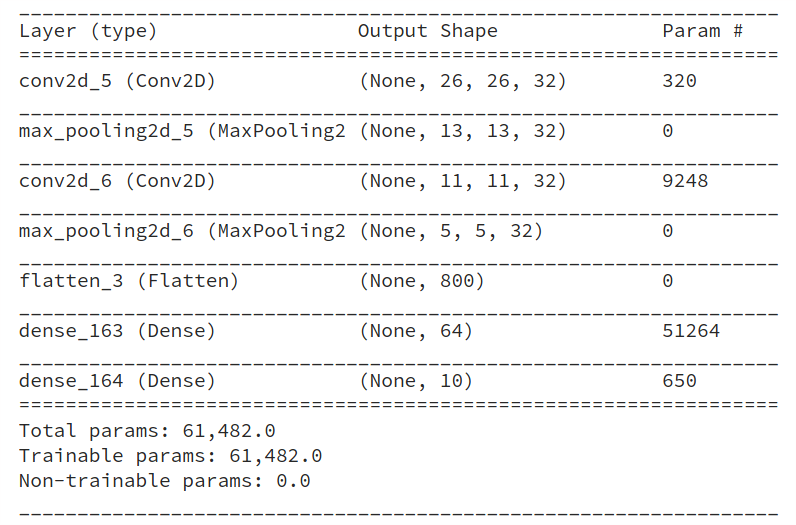
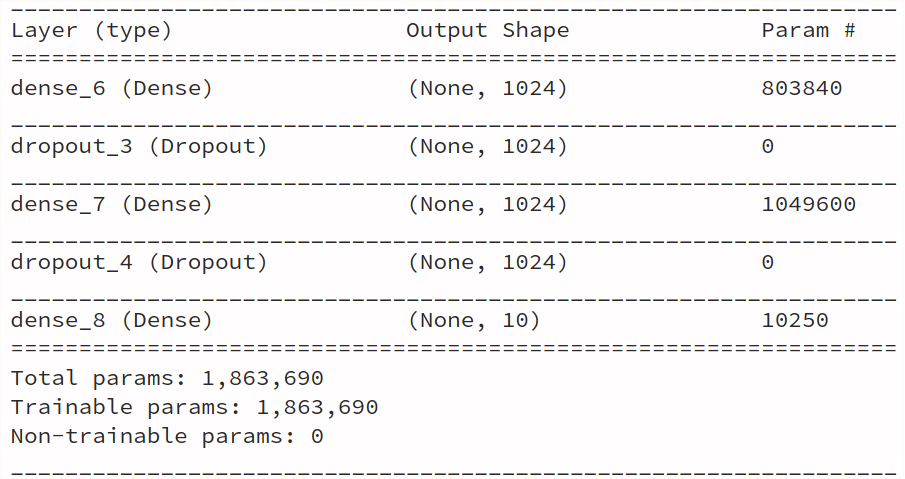
Number of Parameters
Convolutional Network for MNIST
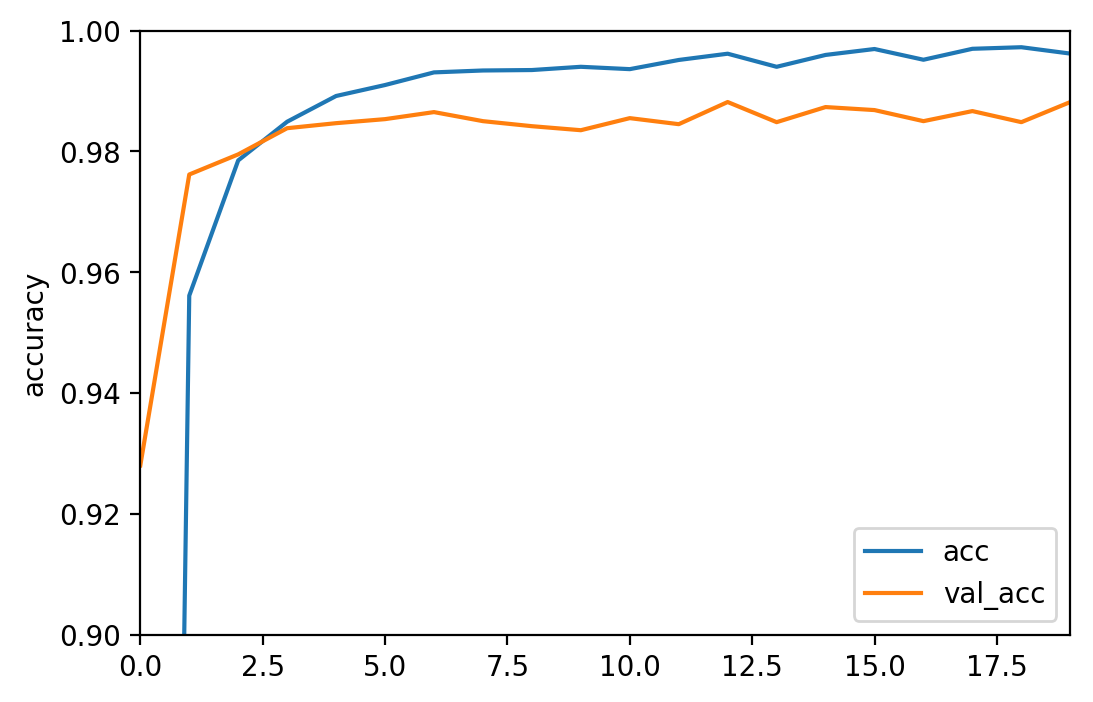
Train and Evaluate
compile (\"adam \" , \" categorical_crossentropy \" , metrics=['accuracy']) history_cnn = cnn.fit (X_train_images, y_train,= 128 , epochs= 20 , verbose= 1 , validation_split= .1 ) 9952/10000 [============================>.] - ETA: 0s
[0.089020583277629253, 0.98429999999999995]
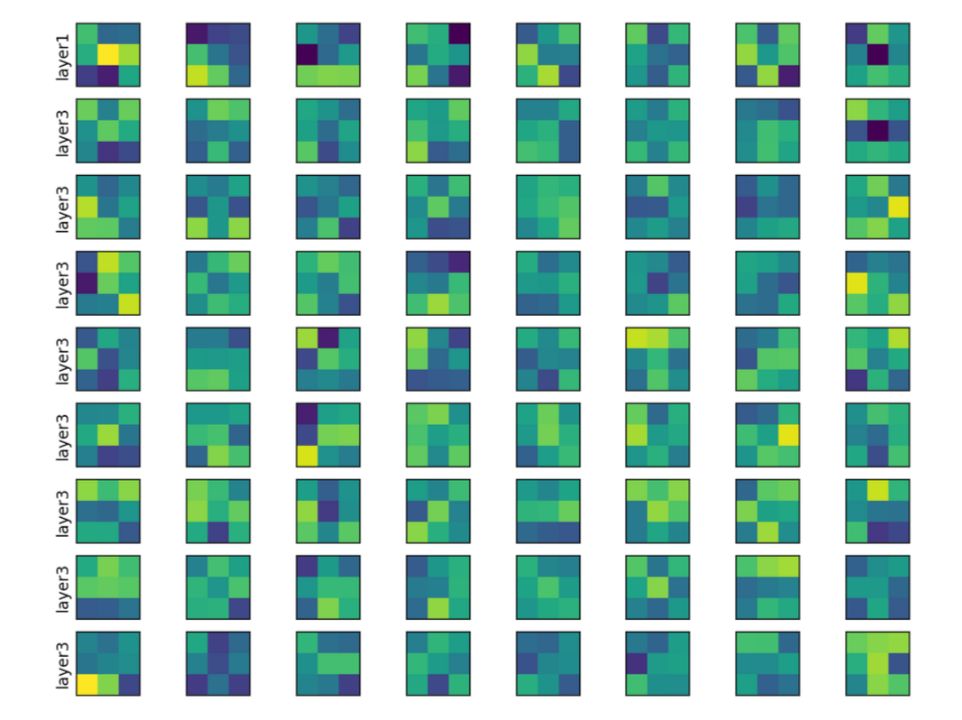
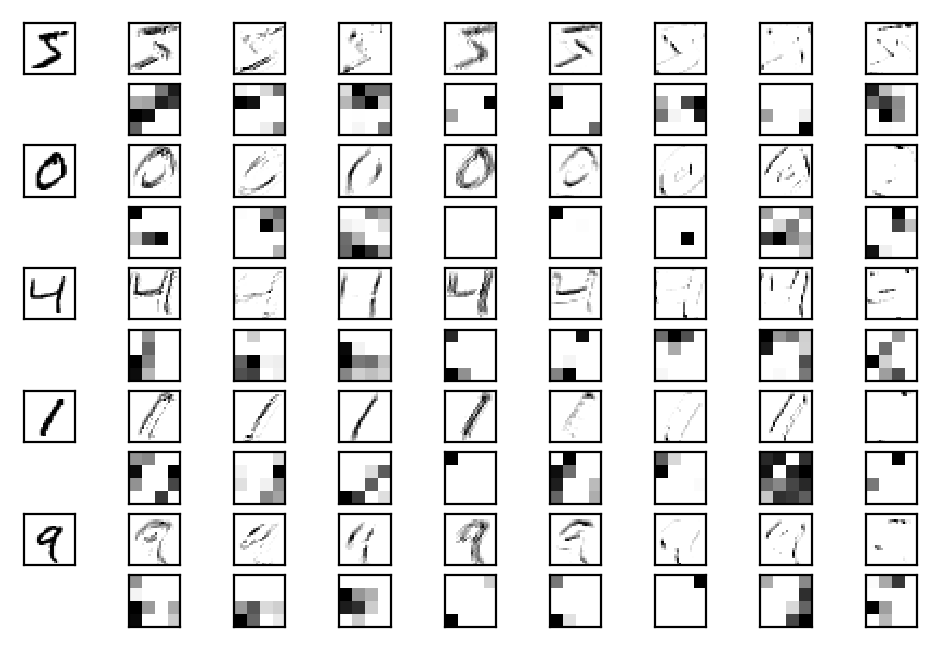
Visualise Filters
= cnn_small.layers[0 ].get_weights()= cnn_small.layers[2 ].get_weights()print (weights.shape)print (weights2.shape)(3,3,1,8)
(3,3,8,8)
MNIST and Permuted MNIST
= np.random.RandomState(42 )= rng.permutation(784 )= X_train.reshape(- 1 , 784 )[:, perm].reshape(- 1 , 28 , 28 )= X_test.reshape(- 1 , 784 )[:, perm].reshape(- 1 , 28 , 28 )
Summary
We’ve covered the architecture and training of neural networks
We also covered the idea and implementation of convolutional neural networks